






Японское космическое агентство JAXA сообщает: 21 сентября небольшие компактные роверы MINERVA-II1 отделились от космического аппарата Hayabusa2
(время отделения 13:06 JST (прим. JST соответствует UTC9)). MINERVA-II1 состоит из двух роверов, Rover-1A и Rover-1B. Оба ровера высадились на поверхности астероида Рюгу. Роверы находятся в хорошем состоянии и передают изображения и данные. Анализ информации подтвердил, что по крайней мере один из роверов движется по поверхности астероида.
Короткая справка о миссии:
- 3.12.2014 года зонд «Хаябуса-2» запущен с космодрома Танэгасима.

- 3.12.2015 года зонд «Хаябуса-2» совершил гравитационный маневр близ Земли, пройдя на расстоянии 3100 км от неё, и, получив дополнительное ускорение, отправился к астероиду Рюгу.
- 28.07.2018 года - сближение с астероидом Рюгу.
- 21.09.2018 года совершена первая в истории успешная мягкая посадка на поверхность астероида. Получены первые снимки с посадочных модулей Rover-1A и Rover-1B.
Подробная информация, схемы и фотографии взяты с сайта JAXA Hayabusa2 Project. Перевод частично онлайновый, поэтому могут быть шерховатости, прошу прощения.
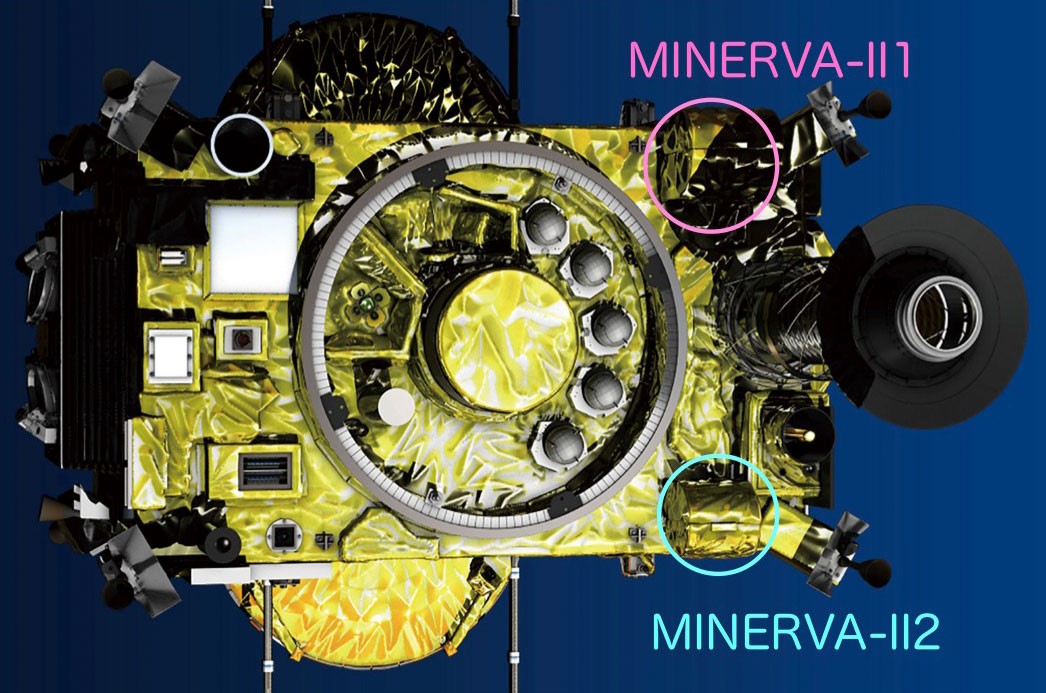
Нижняя панель космического корабля Hayabusa2. (изображение представлено: JAXA)
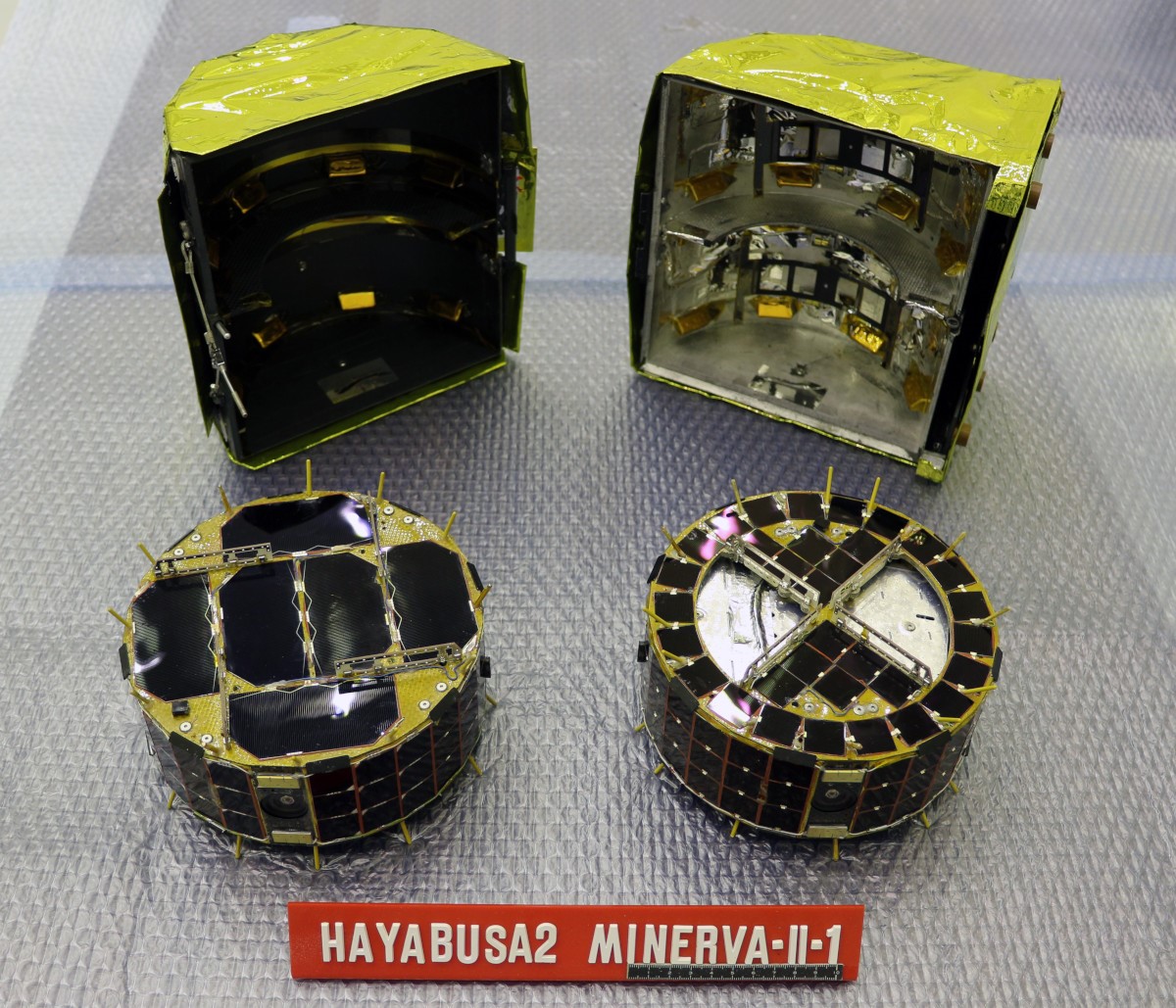
Маленькие роверы, MINERVA-II1. Rover-1A находится слева, а Rover-1B - справа. За роверами находится футляр, в котором они хранятся.
Не совсем понятно, почему эти аппараты называются роверами - по поверхности астероида они должны передвигаться прыжками, поскольку сила тяжести на поверхности астероида очень мала. При вращении асимметричного маховика, установленного на ровере, аппарат совершает серию небольших прыжков.
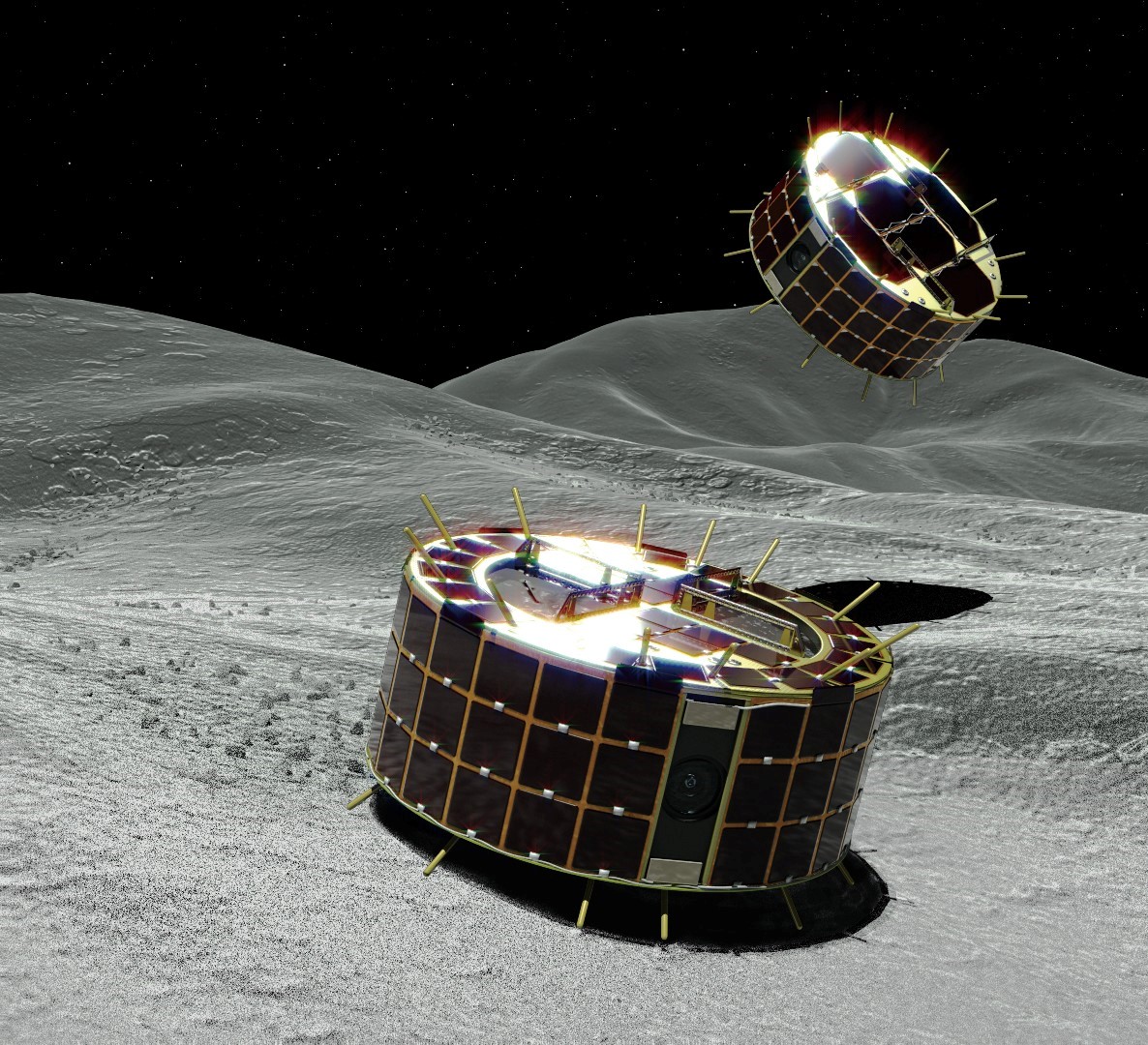 Рисунок: Rover-1A (на заднем плане) и Rover-1B (на переднем плане) от MINERVA-II1 исследуют поверхность астероида Рюгу.
Рисунок: Rover-1A (на заднем плане) и Rover-1B (на переднем плане) от MINERVA-II1 исследуют поверхность астероида Рюгу.
Места посадки и выброса зондов:
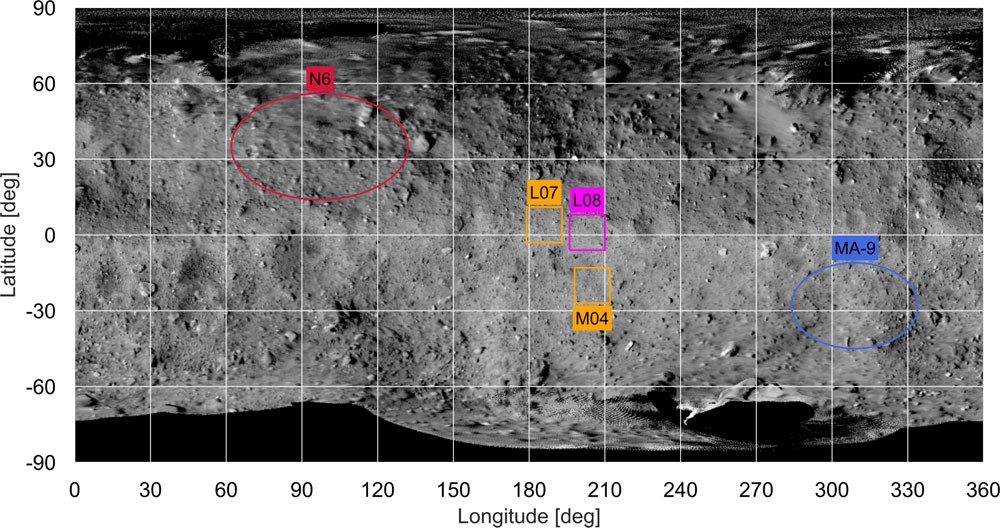
Области внутри цветных линий на рисунке являются площадками для посадки КА Hayabusa2 (для отбора проб), MASCOT и MINERVA-II1. Они обозначаются как:
| - | посадка КА | : L08 (резервные сайты: L07, M04) |
| - | MASCOT | : MA-9 |
| - | MINERVA-II1 | : N6 |
L08 является первоочередным (основным) кандидатом для приземления КА, а L07 и M04 - резервными. Обозначения «L» и «M» относятся к площадкам с низкой широтой (L) и средней широтой (M). Позиции кандидатов «L» были выбраны из 13 предварительных мест-кандидатов, а место «М» выбрано из набора из четырех мест-кандидатов. Размер прямоугольников места посадки составляет около 100 м. MA-9 был выбран в качестве места для посадки MASCOT из десяти возможных, в то время как кандидат N6 для MIENRVA-II1 был выбран из семи возможных мест.
Чтобы помочь приземлению на астероиде, Hayabusa 2 несет пять целевых маркеров, которые JAXA описывают как «похожие на мешки с фасолью», которые могут быть выброшены на поверхность. Они сконструированы так, чтобы выдержать удар, обеспечивая фиксированные опорные точки для попыток посадки.
Hayabusa 2 также несет четыре небольших раздвижных посадочных устройства и ударный элемент. Мобильный астероидный поверхностный аппарат Mobile Asteroid Surface Scout или MASCOT - это немецкий спускаемый аппарат, который совершит посадку на астероид, чтобы провести измерения на поверхности с помощью инфракрасного спектрометра, магнитометра, радиометра и камеры. Аппарат разработан совместно с французским Национальным центром CNES.
Спускаемый аппарат способен сделать один подъем от поверхности астероида, чтобы переместиться на второй участок для дополнительных исследований.
Hayabusa 2 также несет Малый переносной импактор Small Carry-on Impactor (SCI), который будет развернут над поверхностью вместе с субспутником DCAM-3, предназначенным для наблюдения за его воздействием.
SCI состоит из медного снаряда размером 2,5 килограмма (5,5 фунтов) и заряда массой 4,5 килограмма (10 фунтов) HMX. После того, как Hayabusa 2 скроется за астероид, HMX будет подорван, выстрелив медный снаряд в астероид с большой скоростью. Образовавшийся после столкновения ударного ядра с астероидом кратер, предполагается исследовать субспутником DCAM-3.
В общем, программа исследований запланирована любопытная. Хороший тамада и конкурсы интересныеTM.
График развертывания MINERVA-II1
| Дата и время (UTC) | Дата и время (JST) | Скорость космического аппарата (см / с) | Высота НР (м) | Высота над уровнем моря (м) | Мероприятие |
|---|---|---|---|---|---|
| 9/19 00:00 | 9/19 09:00 | 0 | 20,000 | Связь через Усудаский космический центр начинается | |
| 9/19 08:10 | 9/19 17:10 | Связь через Мадрид начинается DSN | |||
| 9/19 16:00 | 9/20 01:00 | Comm. через Goldstone DSN начинается | |||
| 9/20 00:00 | 9/20 09:00 | Comm. через Усуда начинается | |||
| 9/20 04:10 | 9/20 13:10 | подтвердить готовность к спуску | |||
| 9/20 05:10 | 9/20 14:10 | -40 | 20,000 | Начало спуска | |
| 9/20 07:10 | 9/20 16:10 | Comm. через Канберру DSN начинается | |||
| 9/20 08:10 | 9/20 17:10 | Comm. через Мадрид начинается DNS | |||
| 9/20 10:00 | 9/20 19:00 | 13,000 | |||
| 9/20 15:30 | 9/21 00:30 | -10 | 5,000 | Замедление скорости спуска ΔV | |
| 9/20 16:00 | 9/21 01:00 | Comm. через Goldstone DSN начинается | |||
| 9/20 18:30 | 9/21 03:30 | 4,000 | |||
| 9/21 00:00 | 9/21 09:00 | Comm. через Усуда начинается | |||
| 9/21 00:00 | 9/21 09:00 | 2,000 | |||
| 9/21 00:10 | 9/21 09:10 | 1,500 | |||
| 9/21 03:00 | 9/21 12:00 | 500 | |||
| 9/21 03:40 | 9/21 12:40 | 250 | |||
| 9/21 04:00 -04:30 |
9/21 13:00 -13:30 |
~60 | Развертывание MINERVA | ||
| 9/21 04:00 -04:30 |
9/21 13:00 -13:30 |
+50 | ~60 | Пост развертывание вверх ΔV | |
| 9/21 05:40 | 9/21 14:40 | TBD | Увеличьте ΔV, чтобы вернуться в исходное положение | ||
| 9/21 07:20 | 9/21 16:20 | Comm. через Канберру DSN начинается | |||
| 9/21 08:10 | 9/21 17:10 | Comm. через Мадридский DSN начинается | |||
| 9/21 16:00 | 9/22 01:00 | Comm. через Goldstone DSN начинается | |||
| 9/22 00:00 | 9/22 09:00 | Comm. через Усуда начинается |
Заметки:
- Время: приблизительное время расписания (с шагом 5 минут). Возможно, во время работы этот график может измениться. Время события измеряется по бортовой шкале времени, поэтому подтверждение события может задержаться примерно на 18 минут из-за запаздывания радиоволн.
- Скорость КА: это скорость относительно астероида (минус в направлении астероида, положительный - в сторону от астероида). Числовое значение отображается только при выполнении контроля скорости. После операции контроля скорости, скорость изменяется из-за силы притяжения Рюгу и других небесных тел.
- Высота НР: Расстояние до центра астероида Рюгу
- Высота близлежащей точки: расстояние до поверхности астероида Рюгу.
Схема последовательности операций :
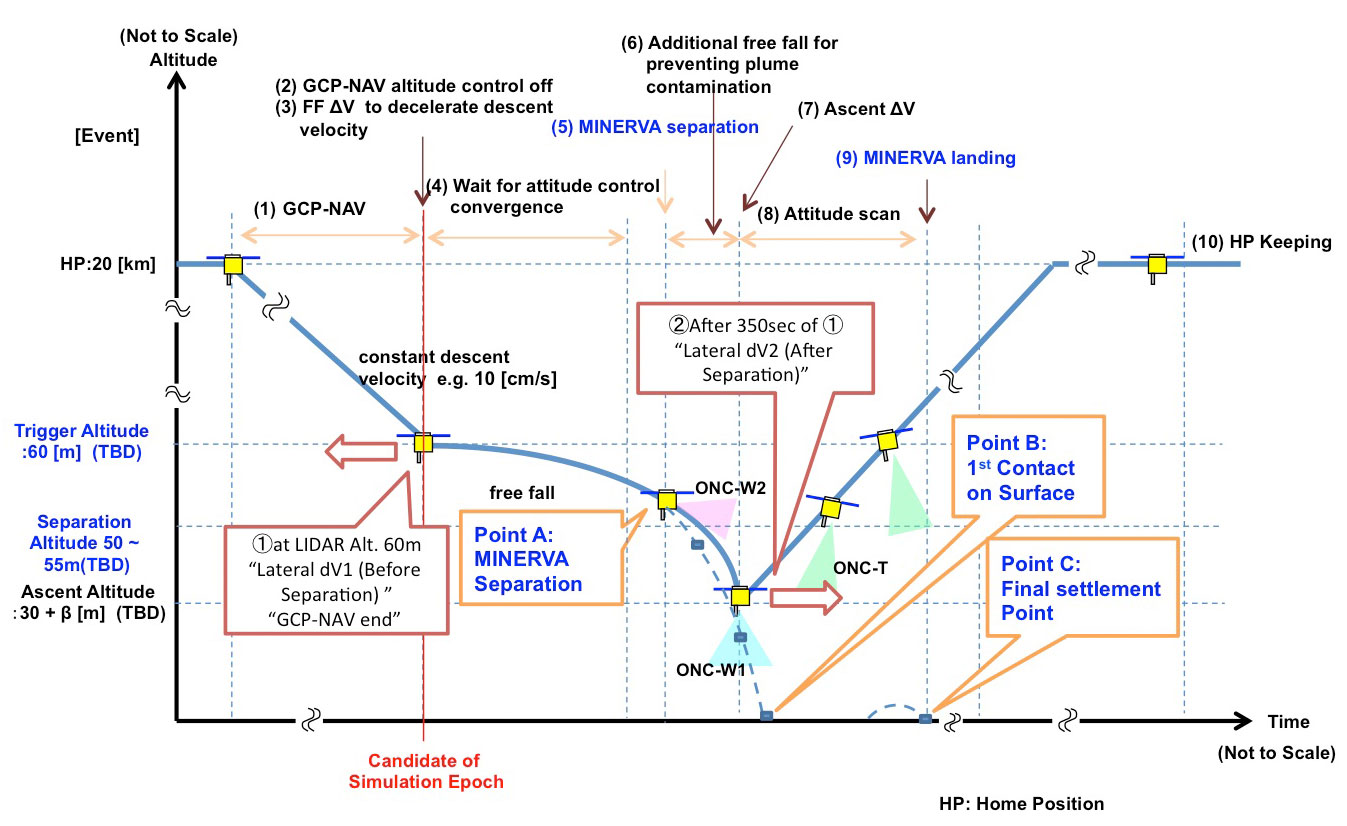 Пояснения:
Пояснения:
- dV, ΔV:ускорение космического корабля.
- free fall:Скорость космического корабля не контролируется, но падает из-за силы притяжения астероида Рюгу.
- GCP-NAV:Ground Control Point Navigation, инструмент для навигации по изображению во время операции спуска.
- HP:исходное положение.
- LIDAR:лазерный высотомер.
- ONC-T:Оптическая навигационная камера - телескопическая (установлена на нижней панели КА).
- ONC-W1:Оптическая навигационная камера широкоугольная 1 (установлена на нижней панели КА). прим. несколько не по-русски, хотел адекватно расшифровать аббревиатуру. Понятно, что литературно будет "Первая широкоугольная оптическая навигационная камера".
- ONC-W2: Оптическая навигационная камера широкоугольная 2 (установлена на нижней панели КА).
- Attitude scan:уточнение ориентации зонда по фотографии MINERVA-Ⅱ1
- constant descent velocity: КА опускается с почти постоянной скоростью. Сначала эта скорость составляет около 40 см/с. С высоты около 5 км скорость составляет около 10 см/с.
- Trigger Altitude:когда эта высота будет достигнута, скорость КА будет контролироваться.
- Additional free fall for preventing plume contamination: КА не будет использовать ДУ в течение периода, показанного на рисунке, когда MINERVA-II1 находится в свободном падении. Это делается для того, чтобы избежать попадания MINERVA-II1 в газовый поток (факел ДУ).
Фотографии с роверов.

Изображение, снятое Rover-1A 21 сентября около 13:08 JST. Это цветное изображение, сделанное сразу после отделения от КА. Hayabusa2 находится наверху, а поверхность астероида Рюгу - внизу. Изображение размыто, потому что кадр был сделан с вращающегося ровера.

Изображение, снятое Rover-1B 21 сентября около 13:07 JST. Это цветное изображение было снято сразу после отделения от космического корабля. Поверхность Рюгу находится в правом нижнем углу. Цветное размытие в левом верхнем углу - солнечный блик.

Изображение, снятое Rover-1A 22 сентября около 11:44 JST. Цветное изображение, выполненное во время движения (во время прыжка) на поверхности астероида Рюгу. Левая половина изображения - поверхность астероида. Ярко-белая область - солнечный блик.
Комментарии
Ура! гравитация существует!
Исаак придет - порядок наведет.
Кстати, да. Дожили. Когда простое подтверждение законов физики вызывает радость. Посмодернизм, блин.
Помню как Гришаев жидко обделался с избыточным теплом при замерзании переохлажденной жидкости, и тем не менее лезет в законы Мироздания
Существует, но не Ньютоновская, а Ломоносовская.
Чо там насчёт золота-платины-редкозёмов? Или нам не скажут?
На Итокаве этого не нашли, но полученный минеральный состав отличался от предполагаемого - около 10% железа и 39% оливина, причем говорили о чистом железе в масконе, расположенном в "голове" астероида. Что тут будет - посмотрим.
Ровер - космический аппарат, предназначенный для передвижения по поверхности другой планеты или небесного тела.
"Планетоход" мне нравится больше.
Из-за в 60000 раз меньшей гравитации, чем на Земле, они не катятся и не ходят, они подпрыгивают. Прыжок 15 минут длится. Астероидоскоками газетару предложила называть. И судя по всему они на один прыжок расчитаны. Просто, чтобы уточнить величину гравитации наверно. https://aftershock.news/?q=node/684710
Рюгоскок звучит достойно, согласен. MASCOT назвали зондом и не заморачивались.
Молодцы японцы - выбрали направление и шаг за шагом развивают технологию от малого к большему. Как ранее точно такой же путь от малого к большему прошли США с роверами на Марсе.
России стоит поучиться - вместо того что бы пытаться сразу же перепрыгнуть через несколько пролетов лестницы и сразу делать что то типа "Фобос-Грунт".
Вот так же нам надо работать с Луной - с малых аппаратов и далее по расширению программы. Постоянно поддерживая одни и те же коллективы и институты работающие над задачей. Что бы не терялись компетенции и каждый следующий шаг был именно следующим после уже сделанного.
У России есть опыт СССР по привозу грунта с луны. Полвека назад еще.
Там была и посадка на двигателях. И покатушки по луне. И возврат на землю.
Так что про "поучиться" вы на полвека опоздали.
Считайте что этого опыта нет. Есть исторический факт. А вот конструктроская школа, специалисты , которые должны были передать опыт следующему поколению , это следующее поколение должно было выпустить технику следующего уровня и тд - всего этого нет.
Сейчас по сути это делается заного. Людьми которые только начинают этим заниматься и у которых есть только опыт в смежных направлениях - спутникостроение, ракеты и т.д.
Поэтому начинать надо с малого и обязательно сразу же озаботиться о том что бы опыт в будущем вот так же не пропал. Что бы это была система с постоянным поступательным движением от поколения к поколению. А не разовая пиар работа.
Рюгуджамперы?
"Талисман" тоже может перемещаться по астероиду, но его называют просто "зонд". Ладно, разработчики так назвали, их право.
Странно. До этого случая никакие аппараты не липли к астеродам. А тут вдруг прилип... ещё одна лунная афёра?
Не стоит останавливаться на полумерах - весь "космос" заговор шароверов!
Фотографий от прыгунов с поверхности астероида так и не было?
Нет, пока только те, что уже выложили.